1. 编写和上传程序
以下内容以 Warden机器人 编写上传一个简单的前进程序为例。
1.1. 设置
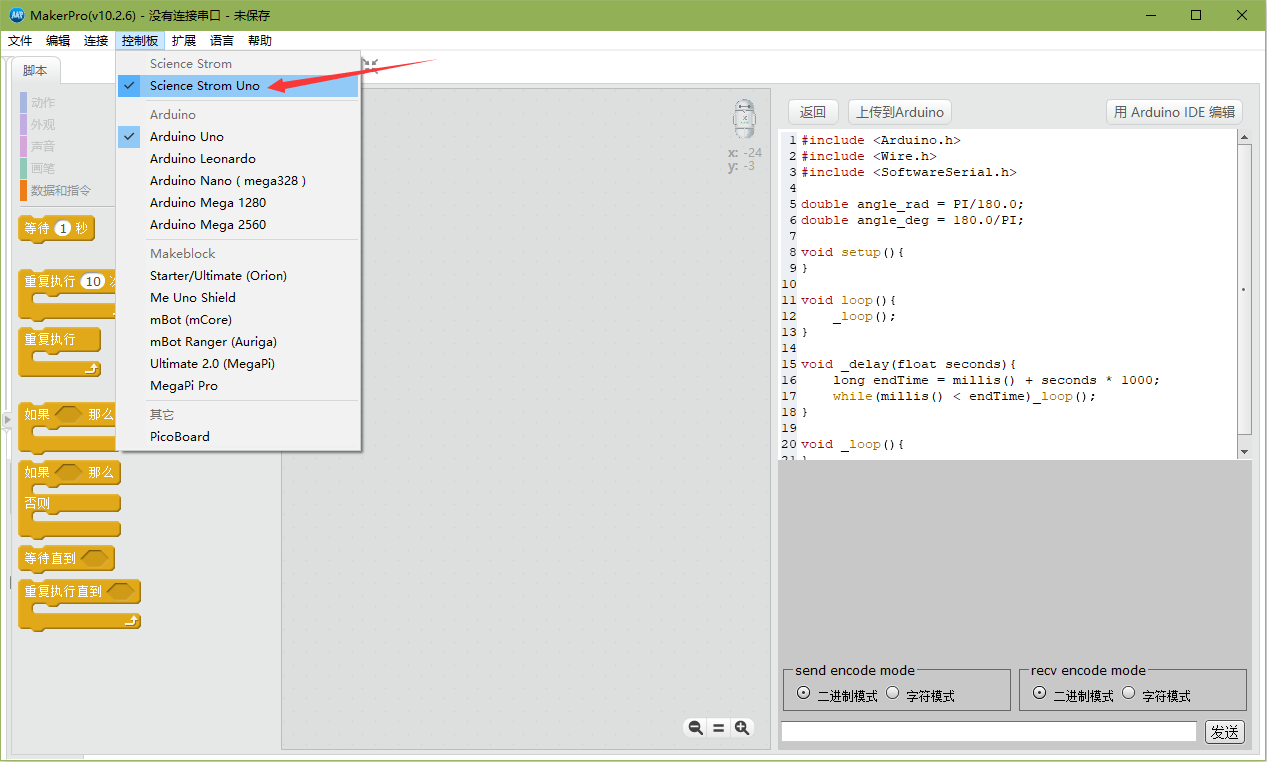
切换到Arduino编辑模式
在控制板中选择 Science Storm Uno
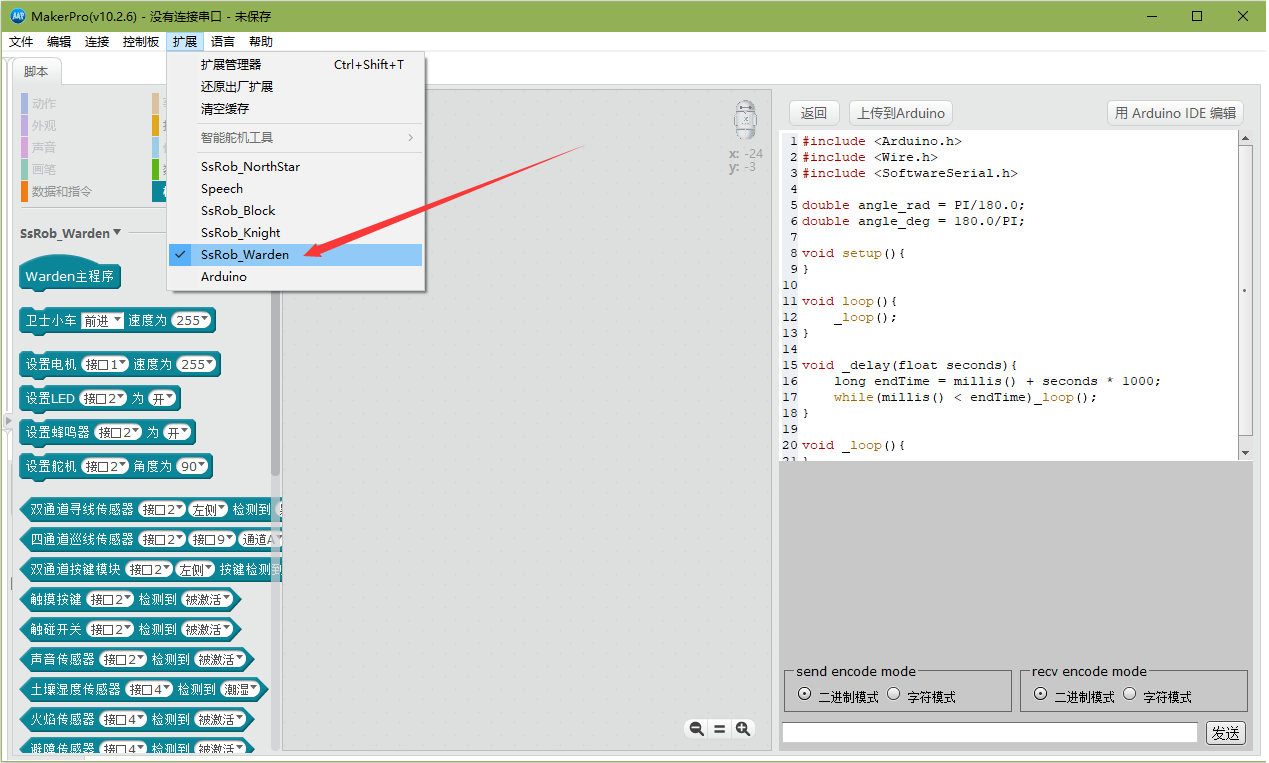
在扩展中勾选控制主板对应的扩展。
注意:控制板扩展只能勾选一个,如果同时加载多个控制板的扩展时,将会导致程序编译上传失败。
1.2. 编写程序
下方以一个简单的 Warden 机器人程序举例,从左侧积木区拖拽积木放置到程序区,搭建一个简单的程序结构。

1.3. 下载(上传)程序
使用USB线连接控制主板和计算机。
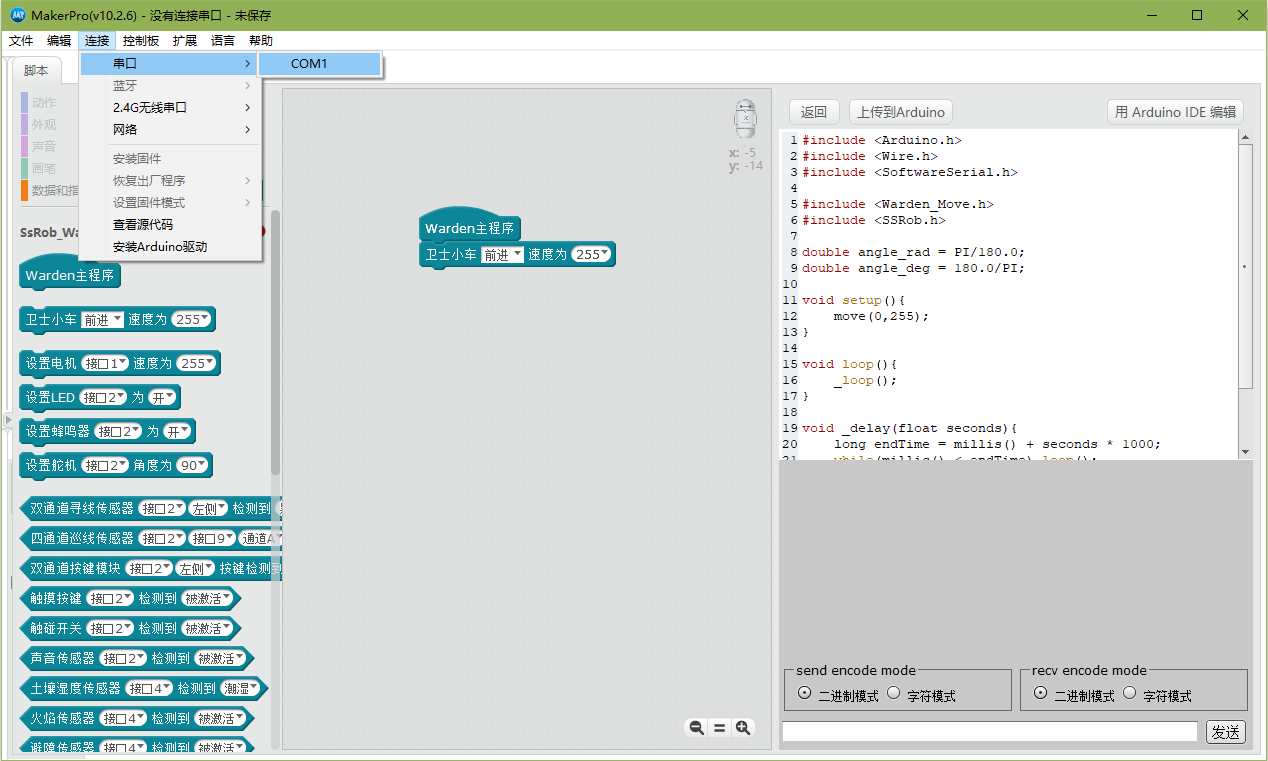
点击工具栏中的 连接,在下拉菜单中选则 串口 -> COMx,此处COM后的数字以实际的编号为准,该选项用于设置与控制主板间的程序上传连接通道。部分台式机可能存在自带串口,如COM1,此时若主板的COM口也被识别,则可能会出现多个COM口编号,此时只需要拔下主板的USB连接线,查看计算机自带的COM编号,再插上USB连接线,查看新出现的COM口编号即可判断哪个是主板COM口。
如下图,在未连接主板时,串口列表中显示 COM1 ,则该端口为计算机自带,而并非是与主板连接的通讯端口。
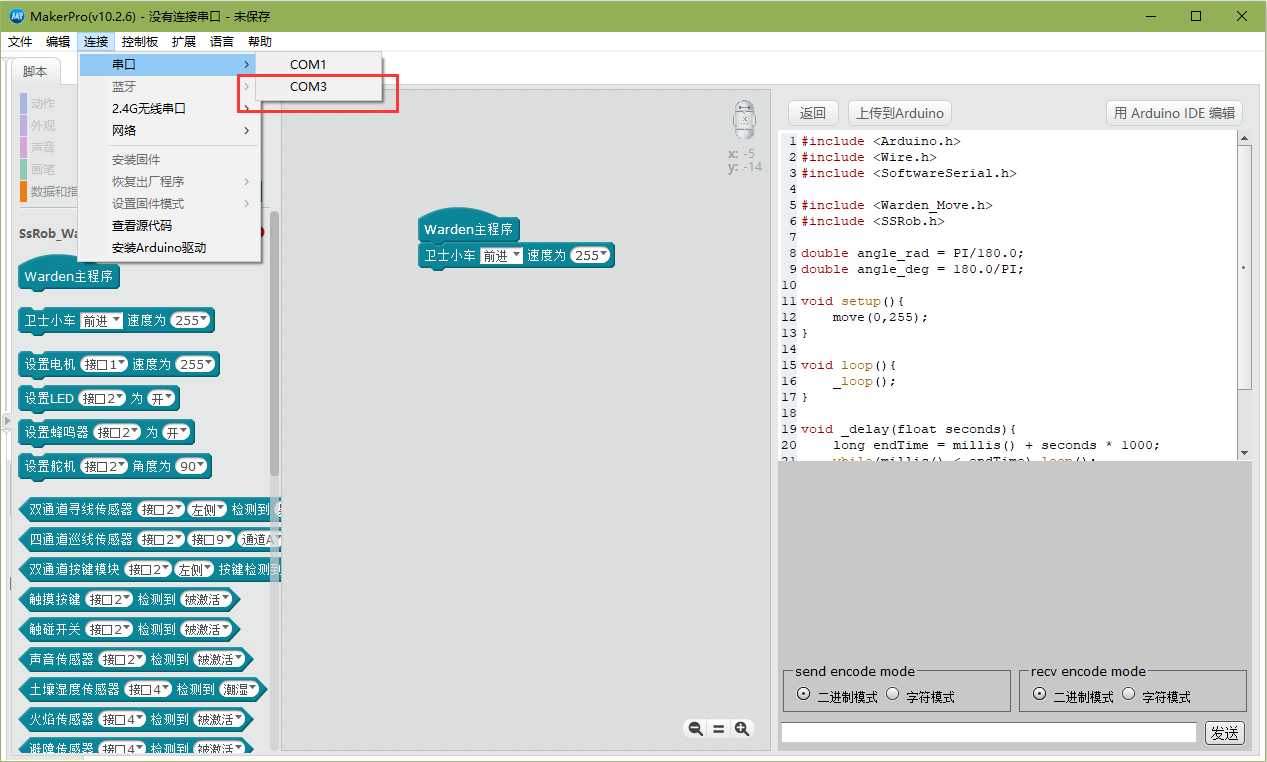
在连接主板后,列表中新出现了COM3口,则说明该端口为主板通讯端口,点击选择改端口即可。
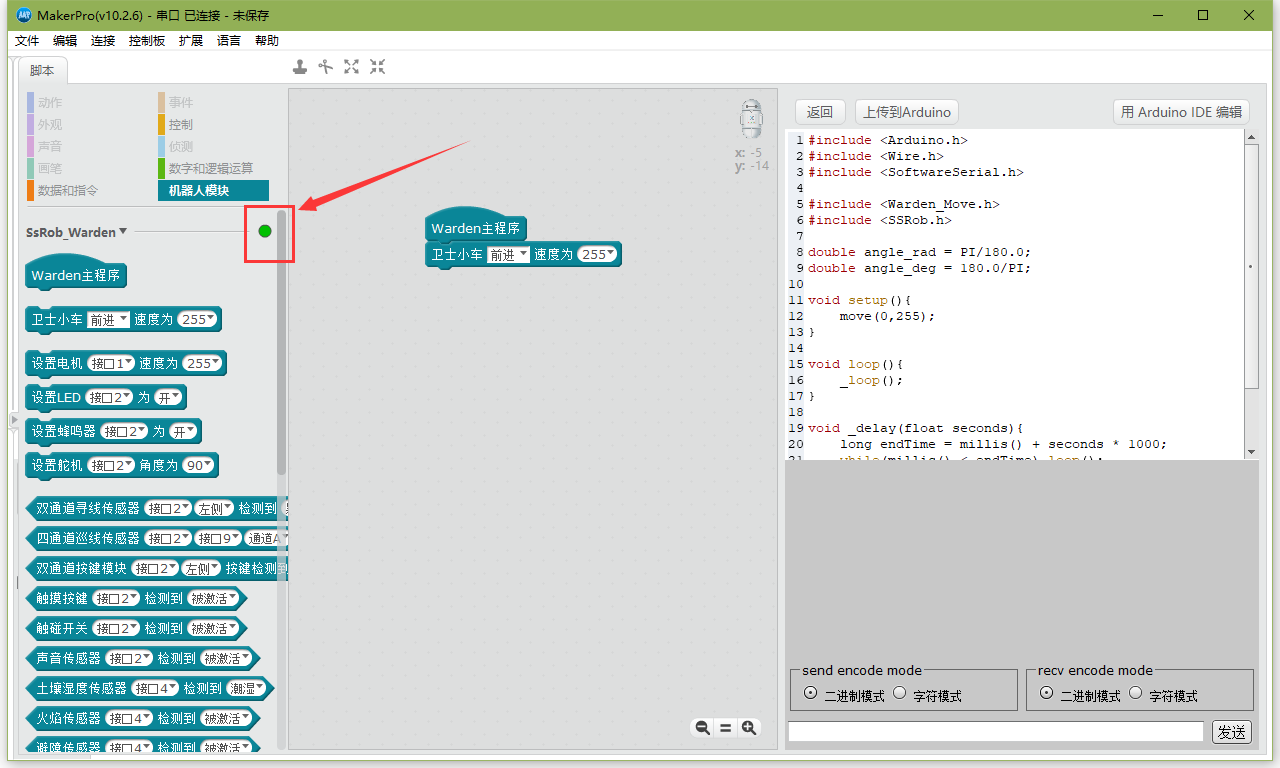
确认连接,如果连接成功,积木区扩展上方的红色标识将变为绿色。
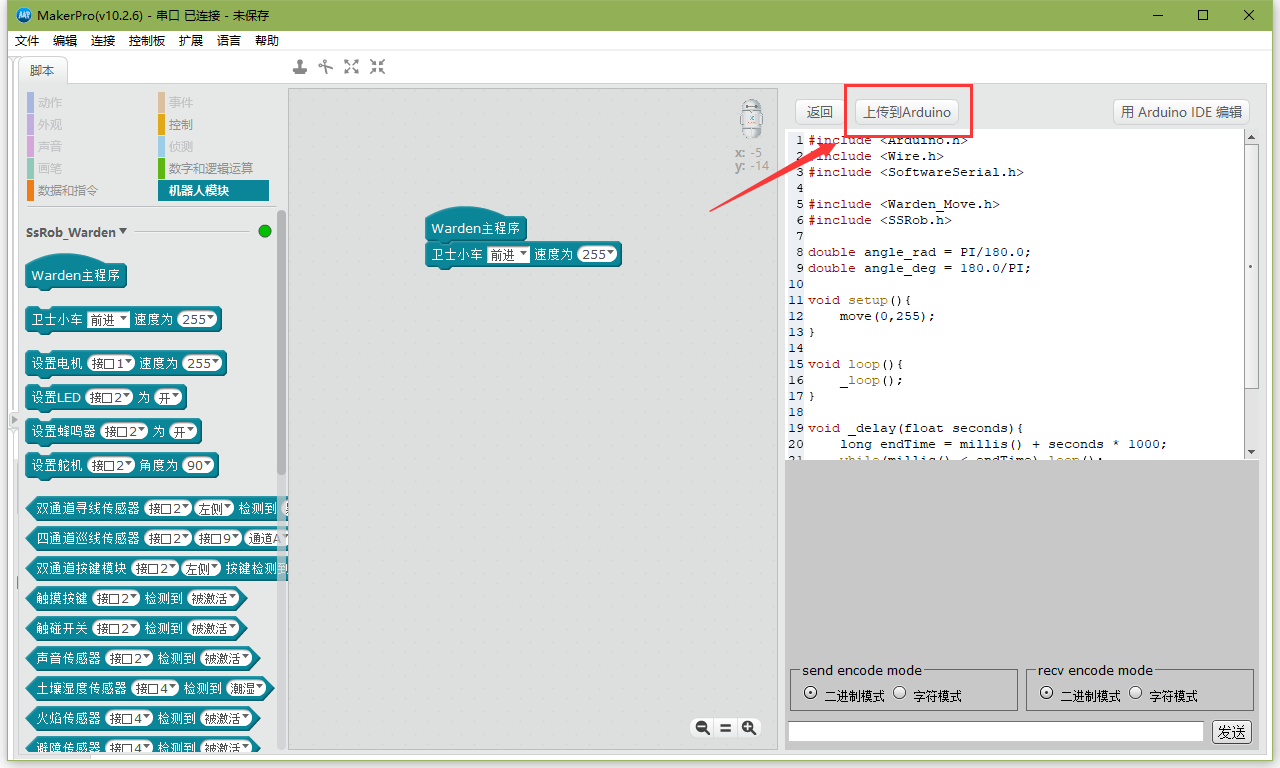
点击软件界面右上方硬件区的 上传到Arduino 按钮来编译程序并上传。
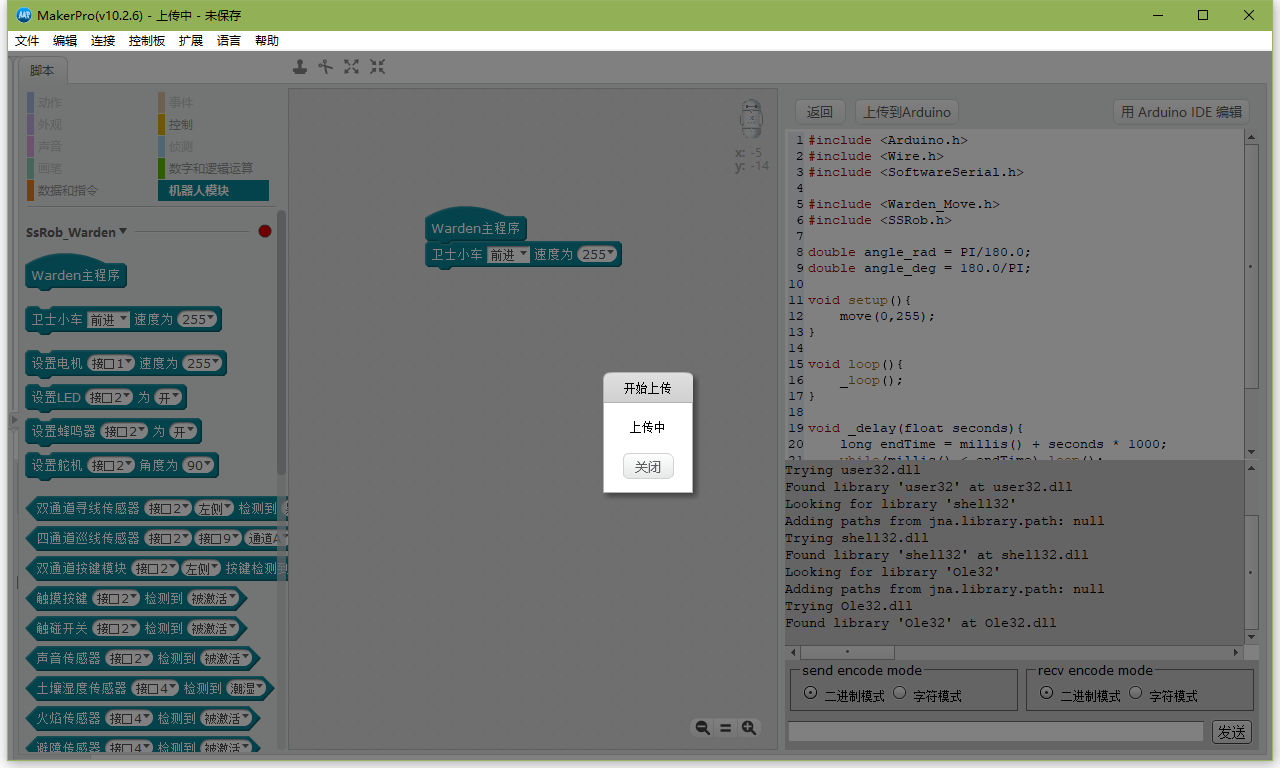
等待上传完毕
程序上传中
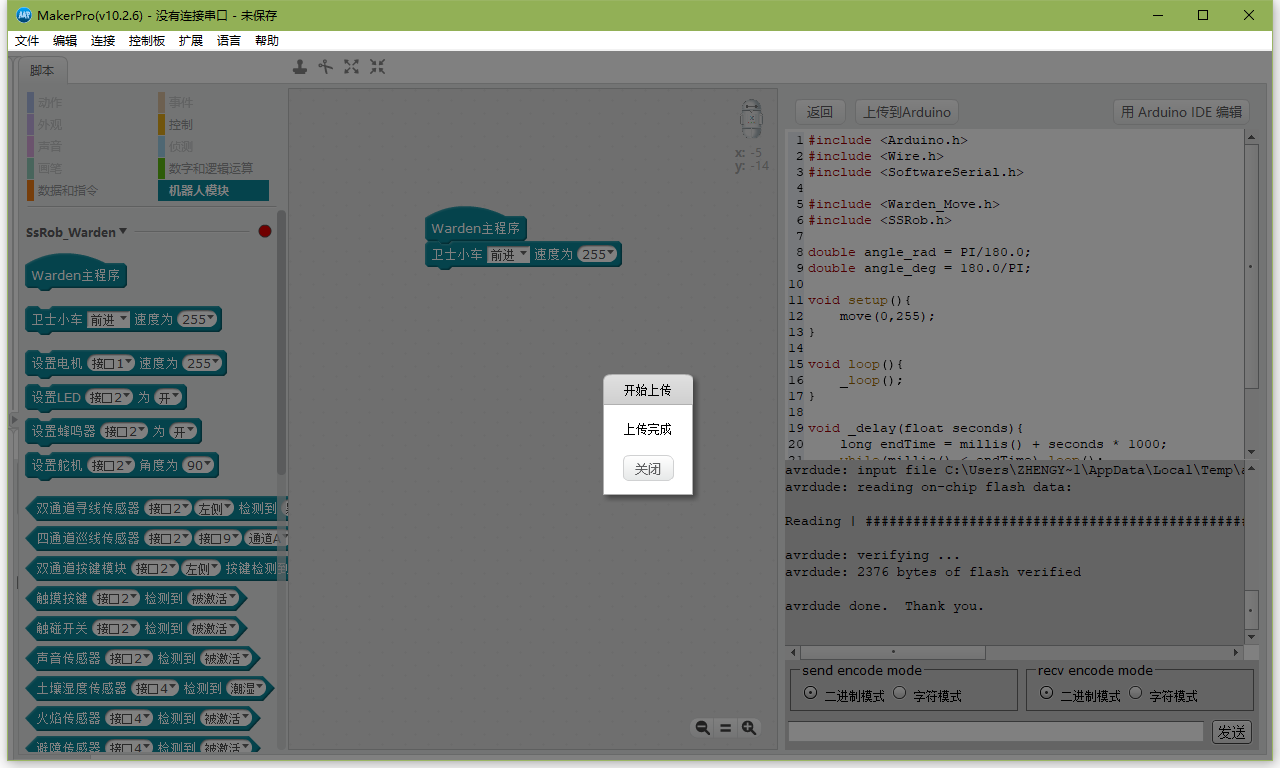
上传成功
上传失败

1.4. 上传失败
如果上传失败,按照程序上传失败问题解决指南解决问题。